The group on the playa sent back some GPS telemetry off of the prototype orb. Matt converted the data to KML format. Here are the first GPS tracks of our prototype orb on the playa!
The group on the playa sent back some GPS telemetry off of the prototype orb. Matt converted the data to KML format. Here are the first GPS tracks of our prototype orb on the playa!
T he lines are 3 GPS tracks. The image is from an image Google Earth took during Burning Man last year. Groovey! (here’s the original .kml files)
he lines are 3 GPS tracks. The image is from an image Google Earth took during Burning Man last year. Groovey! (here’s the original .kml files)
The orb has arrived on the playa, and thanks to our kind friends at Geek Week, we can blog live during our testing.

Here, Beth and Tzara from the Geek Week camp examine the orb as it meets the playa surface for the first time!
UPDATE-
We tested, and it rolls wonderfully on the playa surface! We tested Zigbee out to 500 feet with signal to spare, and we’ve got copious GPS data to crunch later. A successful test run, and we’ve still got time to screw around and experiment…
I thought I’d post a few images of strength and acoustic testing conducted by Lee and Tad last weekend. Silliness abounds!


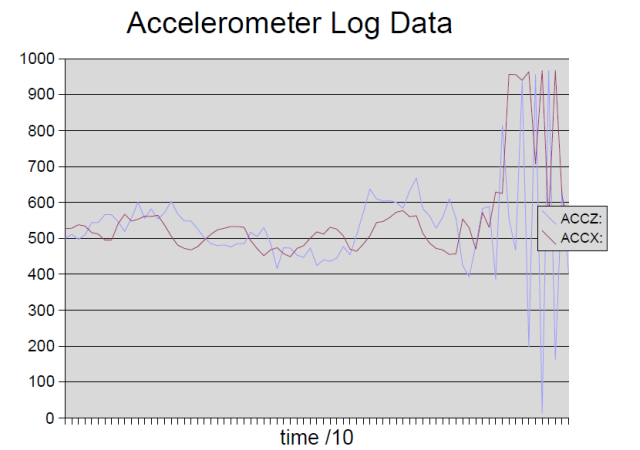
Not only that, we can measure it. Here’s a plot of two axes of accelerometer data. This was generated by the Inertial Measurement Unit, talking to the daughterboard, passed through the SPU, then captured by the new logging feature of the mothernode dashboard application.
(Did you know Python has a csv module for saving exactly this kind of data? I just found that and it sure made it easy. Three lines of code, people!)
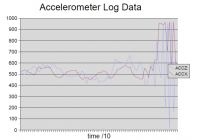
This data shows me gently turning the IMU from side to side, then waving it around.
Full-court press (or should that be “roll”) this weekend for orb test in the desert next week. Come on down and help! We’ll be at the boxshop getting in the way of the Flaming Lotus Girls.
Lisa, Michael and I have been working on building more orbs. Lisa and I have been working on an aluminum orb with all the welds on the inside; we set it down next to the one with the welds on the outside and there was no question which shows off the cool lines of the orb better. Welding the inside is a tiny bit harder than the outside but totally worth it.
We set up and tacked hemisphere #3 (of 12) in place on Sunday on the jig. Yesterday I threw a few hours at the welds. Today I’m going to finish up the orb. Tonight Lisa and I will put hemisphere #4 on the jig. :-)
I welded until I ran out of argon for the TIG last night so I’ll be filling that up today.
————————————————–
On a side note, the Box Shop has been abuzz with activity. The Serpent Mother has been being polished up for her trip to the Fire Arts Festival and then Robodock. She’s got to fit in a 40′ shipping container for her trip to Amsterdam. That container is only 60% the size of the truck she took to Burning Man in 2006!

update 6-28-07: Steve Monahan gave me a hand last night welding the top and bottom of hemisphere 4. He’s got great technique. Hemisphere 3 still needs some love because of my crappy technique.
We are going to try and weld just the interiors of the orbs. That does a great job of preserving the clean lines. We’ll see if that makes them strong enough.
Photo: That’s Lisa doing some finish work on hemisphere #3.
Well, the boards came yesterday and passed the smoke test (you plug it in and if it doesn’t smoke, it passes). Today I got everything working together: Here’s the daughterboard motor controller, sitting happily on top of mom SPU.
 Both are running fine and chatting happily together. That’s a warm fuzzy feeling, right? It sure is for me.
Both are running fine and chatting happily together. That’s a warm fuzzy feeling, right? It sure is for me.
Technical details: the daughterboard contains an Atmega-8 microcontroller and mates with a TS-7260 embedded Linux board from Technologic Systems. The Linux board is the Swarm Processsing Unit, or the SPU as we like to call it. It’s the brains of the system. The daughterboard microcontroller generates motor control signals and reads analog signals from the inertial navigation unit. Petey the Programmer made the prototype version this is based on: thanks Pete!
 As of Saturday night, the pieces for all 6 orbs have been cut! Rich Humphrey, Jon Foote, Rick Lellinger, Lisa Schile, and myself worked two marathon sessions totalling more than 20 hours to keep the Omax Model 55100 abrasive waterjet machine running. The result is more than 500 cut ribs, giving us a few to spare beyond the 480 necessary to fabricate 6 orbs.
As of Saturday night, the pieces for all 6 orbs have been cut! Rich Humphrey, Jon Foote, Rick Lellinger, Lisa Schile, and myself worked two marathon sessions totalling more than 20 hours to keep the Omax Model 55100 abrasive waterjet machine running. The result is more than 500 cut ribs, giving us a few to spare beyond the 480 necessary to fabricate 6 orbs.
From Mike:
Just a brief note to let you all know that Lisa, Steve Monahan, and I
finished welding the aluminum orb last night and brought it to the Box
Shop for testing. There, Erik, Lee, Jon and I got it running and put
it through it’s paces. I’m pleased to report the test was a success!
I am confident that the current design with 1/8″ 5052-H32 aluminum is
structurally sound and rolls acceptably smoothly.
Special thanks are due to Jack Schroll, Steve Monahan, and Germ
Travis, who went out of their way to help us out in our hour of need!
Otherwise, a couple modifications were made to try to improve steering
performance, based on the feedback from many people to make it the orb
easier to roll straight and avoid a high point at the equator.
One was to cut into the equator rings (annuli) to keep them from
sticking out further than the ribs. I think this is successful, and
its my intention to move forward with this design feature.
The other was to make a elliptical cutout on all the elements near the
equator so that there is a kind of flat spot in the middle to provide
a slight centering force. The consensus last night was that at 0.2
inches of the radius, this was too extreme a cut. This self centering
tendency resulted in a significant trade off with turning ability,
logically enough. My feeling is to move forward with a more subtle
cut; I will be experimenting with the geometry to see if there is any
way to make sense of deciding the optimal balance of self-centering
and steering capability.
-mike
And a little supplement from Lee
We put in a late night Wednesday night…
– The orbs look great :-)… like something made by NASA or a benevolent alien race come to destr^H^H^H^H greet us. Clear anodizing at the Tech Shop could keep them looking like that for a long time.
– they didn’t bend or buckle or nuffum :-) :-)
– they were designed to be a little flat at the equator to help stabilize them…. maybe they were too flat… we’re still thinking on that
– it’s pretty hard drive around smoothly. It sometimes rocks around uncontrollably…. solutions to that are forthcoming…
– some PID feedback loops have to be tweaked a little
– maybe the length of the steering motor throw has to be increased
– we didn’t try it on soft ground. Only in the shop.

That’s the most of it. I’m off to install the TIG welder :-)
Our latest toy arrive yesterday. It’s a Lincoln Electric Precision TIG 225. This will help us get the orbs together and enrich the Box Shop for years to come. After getting it installed in the Box Shop, Michael and I got some play-time (IE practice time) and all I have to say is “Weeeeee!”
Behold…
 Here it is test-fit together, after hours of grinding by Ray, James, and Michael.
Here it is test-fit together, after hours of grinding by Ray, James, and Michael.
Tomorrow, with luck, we weld.
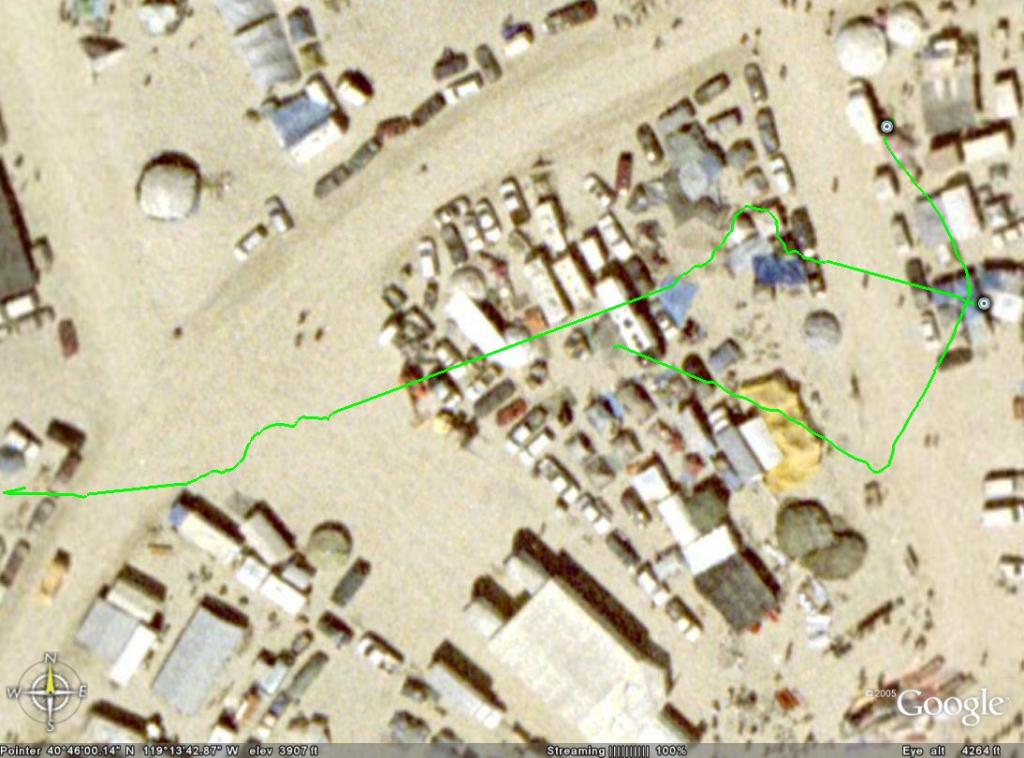 The group on the playa sent back some GPS telemetry off of the prototype orb. Matt converted the data to KML format. Here are the first GPS tracks of our prototype orb on the playa!
The group on the playa sent back some GPS telemetry off of the prototype orb. Matt converted the data to KML format. Here are the first GPS tracks of our prototype orb on the playa! he lines are 3 GPS tracks. The image is from an image Google Earth took during Burning Man last year. Groovey! (here’s the original .kml files)
he lines are 3 GPS tracks. The image is from an image Google Earth took during Burning Man last year. Groovey! (here’s the original .kml files)