Control System Design
From OrbSWARM
Contents
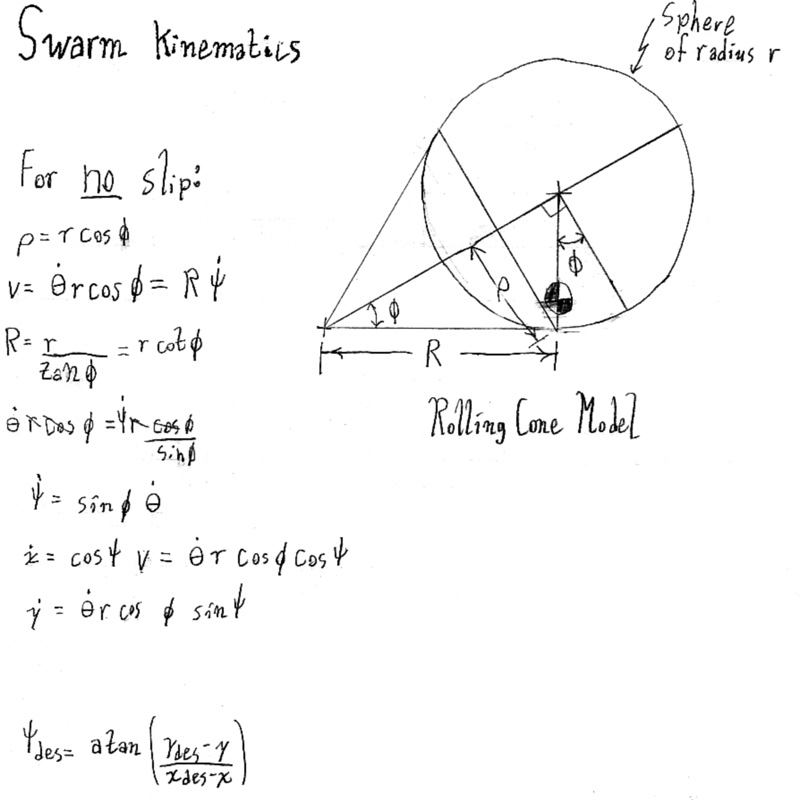
Coordinate System
Here's an old illustration:
This is not entirely accurate any more. Currently-
- x is forward
- y is left
- z is up
- psi is heading - 0 is due east, and it increases according to right hand rule around z axis
- phi is roll angle - right hand rule around x axis
- theta is pitch angle - right hand rule around y axis
Estimation
- Coordinate System
- SWARM Extended Kalman Filter v1
- media:Swarm_kinematics_061220.jpg
- A Generic Extended Kalman Filter Formulation
- NMM EKF Code
{kind=link}
{kind=link}